大きな一歩
先週の日曜日は東海大"Challenge Cup 2013"へ。
初開催とは思えないスムーズな運営に感動した大会だった。スタッフの皆さん本当にありがとうございました。
さて、今回の車体はバッテリー、モーター、タイヤを一新した車でぶっつけ本番だったが、結果は予選ベスト 00'16"40 第12位。ベスト8入りするためにはあと3秒の短縮が必要だ。今回の大会もRMCR同様、試走時間内なら何度でもタイムアタック出来たので、様々な走り試せて楽しかった。やるべき事、改善点が明確になったので、マイコンカーラリー競技会&技術交流会へ向けて改良しよう。
ここ最近、嬉しい事に大会で必ず結果(完走)が出せるようになった。レースである以上、"勝ち"にこだわって、勝利出来るように努力したい。
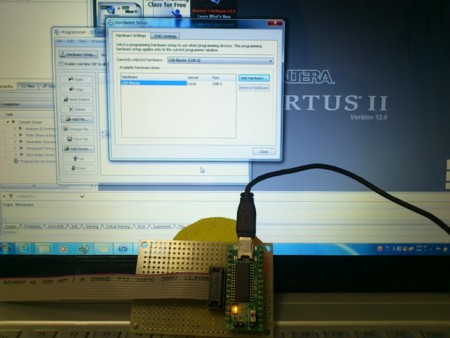
アルテラCPLD
構成: Win7 64bit + USB-Blaster + Quartus2 WebEdition 32bit
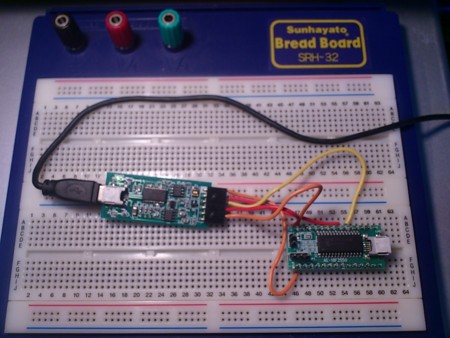
眠っていたPIC18F2550を活用して、"USB-Blaster"を作成。Quartus2 Stand Alone Programmerを追加インストールすると、Quartus2上で自作基盤を"USB-Blaster"と認識してくれた。Win7 64bitにQuartus2 WebEdition 32bitをインストールするとJTAGの不具合が出るのかな?とりあえず、これで念願のCPLD開発環境が整った。4輪独立CPLDドライブ回路まではまだまだ程遠いが、早速MAX2を動かしてみたいと思う。
メモ
現行自作ステアリング
モーター RE16 118682 3.2W
ギアヘッド GP16A 110322
出力軸受け:スリーブベアリング
平均バックラッシュ:1.6°
ギア比:1:19:20:80=1:76
出力軸受けがボールベアリングでない事は気づいてたけど、それよりビックリなのはバックラッシュの数値。
平均バックラッシュ1.6°!?という事は、単純に出力軸直結でセンサーアームを固定したと仮定した場合、今の車体は出力軸〜アナログセンサ素子まで282mmなので、センサーが7.89mmもブレる事になってしまう。7.89mmもブレるなんて、A/D値が160近く変動するはず。
でも、出力軸のギアと最終段のギア間にもバックラッシュがあるけど、どう考慮すべきなのかな?最終的にバックラッシュの数値として加算されてしまうのかな!?
やっぱり、ギアヘッドを無くして、少ないギア数で自作サーボ機構を作ろう!!